近日,我校自动化博士生李伟以第一作者和共同通讯作者身份,在《科学》杂志子刊《科学·机器人学》(Science Robotics)上刊登发表的学术论文“AADS: Augmented Autonomous Driving Simulation Using Data-Driven Algorithms”,该论文突破了现有的自动驾驶仿真技术存在的许多障碍。
自动驾驶是近年来炙手可热的研发项目,通过仿真测试来评估、提高其安全性是自动驾驶技术开发的关键所在。该研究成果介绍了一种增强现实的自动驾驶仿真系统,它可自动创建逼真的道路场景,为自动驾驶车辆提供更为可靠且廉价的实验室模拟方法,可大规模用于训练和测试评估自动驾驶系统的路径规划和决策算法。
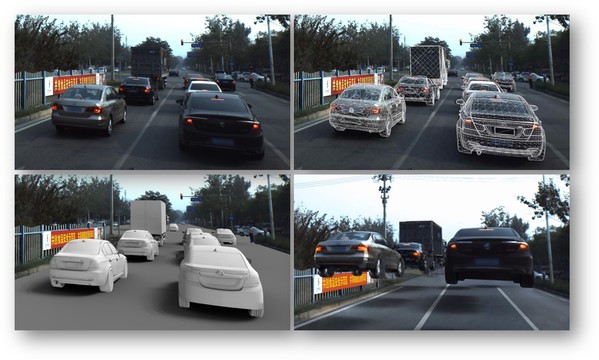
李伟在研究中主要负责真实图像合成、仿真系统整合与文章撰写。自动驾驶汽车依赖于感知模块和导航模块,感知模块接收并解释现实世界的信息,导航模块根据感知的信息做出决定,比如转向哪里、是否刹车或加速。不同于现有仿真系统,AADS能更准确、更真实地模拟自动驾驶汽车在路上接收到的信息,在感知层面便更接近于真实世界。
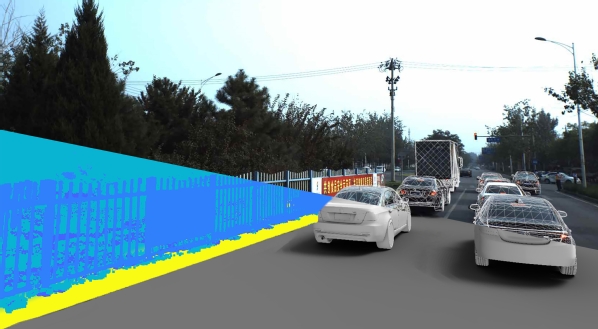
现有的仿真系统在呈现真实的交通流、驾驶员与行人的互动等场景中仍有很多不足,与真实的环境存在较大的差异。在研究AADS的过程中,最大的难题同样是如何将道路的真实情况进行仿真合成。李伟及研究团队用视频和照片来模拟真实世界的道路和动作,这种数据驱动的方法提供了一个更加现实和有益的交通仿真模型。“我们这个系统其实就是在弥补与现实环境的差异,目前我们的研究应该是最接近真实环境的。”李伟向记者解释到,“目前学术界和工业界尚未有特别针对自动驾驶的街景合成技术,而我们的研究则在这一点上完成了突破。”
对于该项研究成果的应用前景,李伟表示仿真技术和自动驾驶两者的发展是相辅相成的。“自动驾驶前景良好,同时也需要相关的配套技术来辅助测试、验证,因此仿真技术也一定会得到发展,并促进自动驾驶技术的成熟。这也是我们研究这个仿真系统的初衷。”
《科学》杂志是全球最权威的学术期刊之一,代表了人类自然科学研究的最高水平。《科学·机器人学》杂志是其五个子刊之一,平均每期刊出不多于4篇的研究类文章,刊载难度很大。

论文链接:http://robotics.sciencemag.org/content/4/28/eaaw0863