9月28日下午,意大利米兰理工大学Hamid Reza Karimi教授应我校国际合作处和我院的邀请,通过腾讯会议作了题为“Distributed Control of Multiagent Systems”的线上学术报告,报告由我校副校长姜斌教授主持,学院师生在线参加会议。参会师生对Hamid Reza Karimi教授的交流分享表示热烈欢迎。

近年来,多智能体系统的分布式协同控制设计问题受到了越来越多的关注。相比传统的集中式系统,其更具灵活性,分散性,并拥有更强的鲁棒性。Hamid Reza Karimi教授就此方向做了题为“Distributed Control of Multiagent Systems”的学术报告。

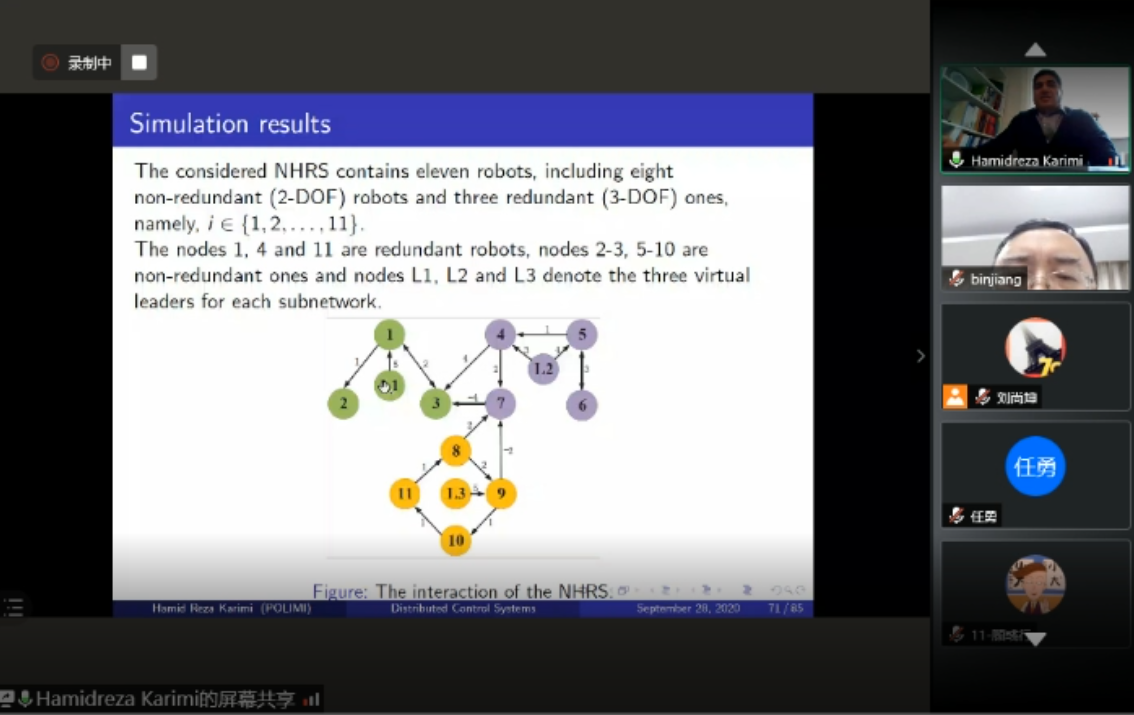
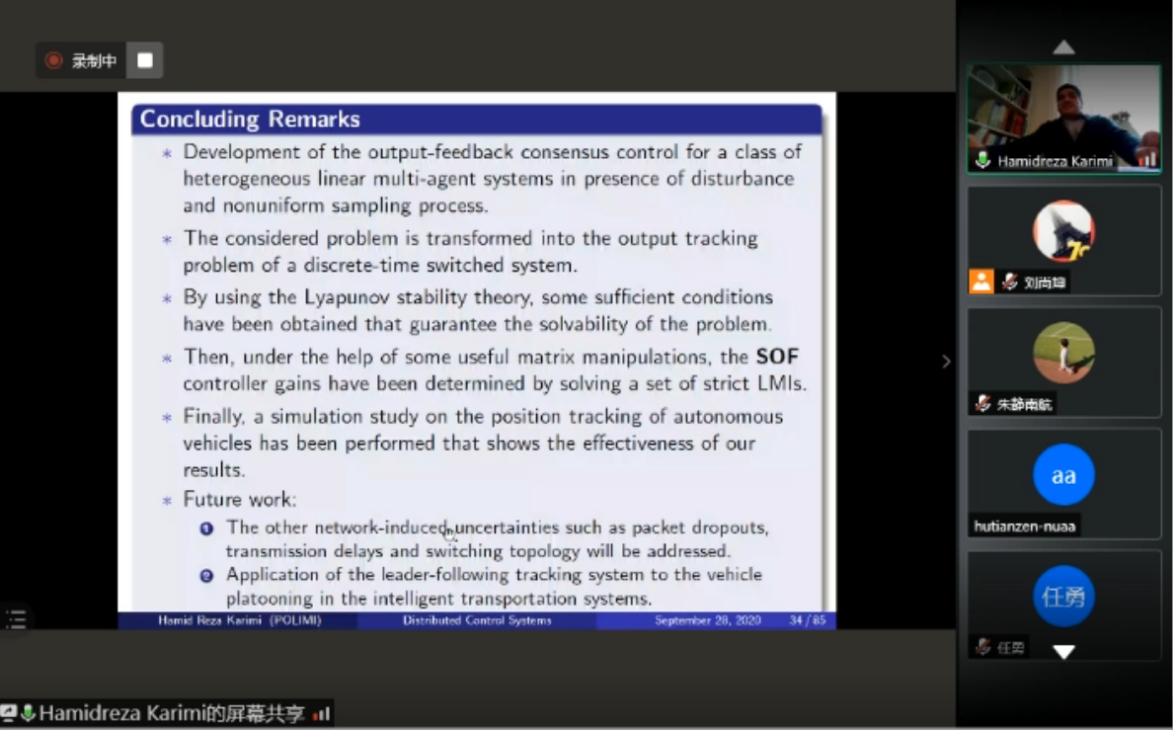
报告首先给出了关于分布式协同控制系统或针对多智能体系统一致性的分布式模型预测控制的一些挑战和最新结果,着重介绍了通信控制协议下先进控制器设计策略的开发。其次,给出了近来一些关于网络机器人系统协同控制的结果,特别是网络异构机器人系统的有限时间输出多编队跟踪问题,其中每个机器人模型都包含外部干扰,参数不确定性以及可能的运动学冗余。接着,讨论了几种实用的有限时间分层控制算法以及相应的收敛性分析。最后,给出了一些结论。
学术报告后,参会的师生对于Hamid Reza Karimi教授报告的内容进行提问,得到了Hamid Reza Karimi教授的详细解答。